建立 TradFi 拼盤機器人時,您需要設定關鍵參數來定義交易策略。本指南將逐一介紹各項參數,並說明其在設定機器人時的作用。
機器人建立頁面
建立 TradFi 拼盤機器人時,您可以從三種模式中選擇:AI 策略、手動或網格。
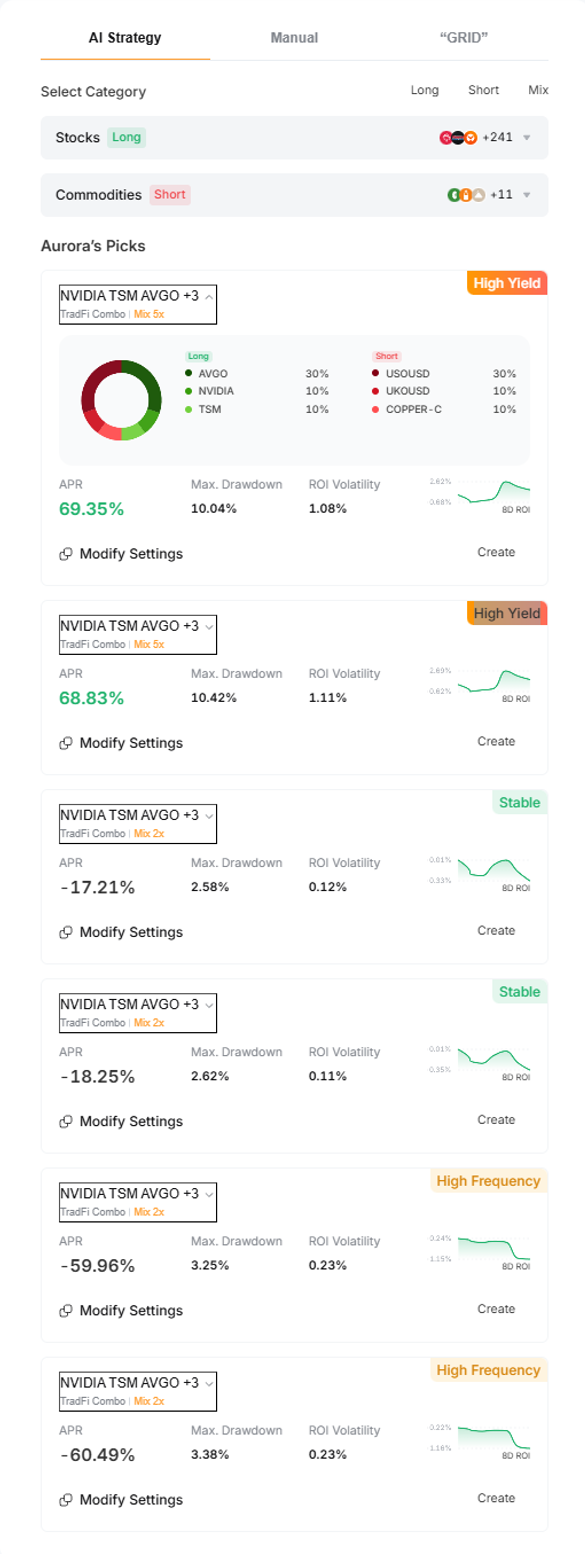
AI 策略
在 AI 策略模式中,您會在「Aurora 精選」下找到六種預設策略,這些策略是由 AI 根據歷史數據和預期市場趨勢所產生。您可以根據自己的交易風格,選擇高收益、穩健或高頻策略,只需點擊幾下即可部署您的組合策略。這讓新手更容易上手。
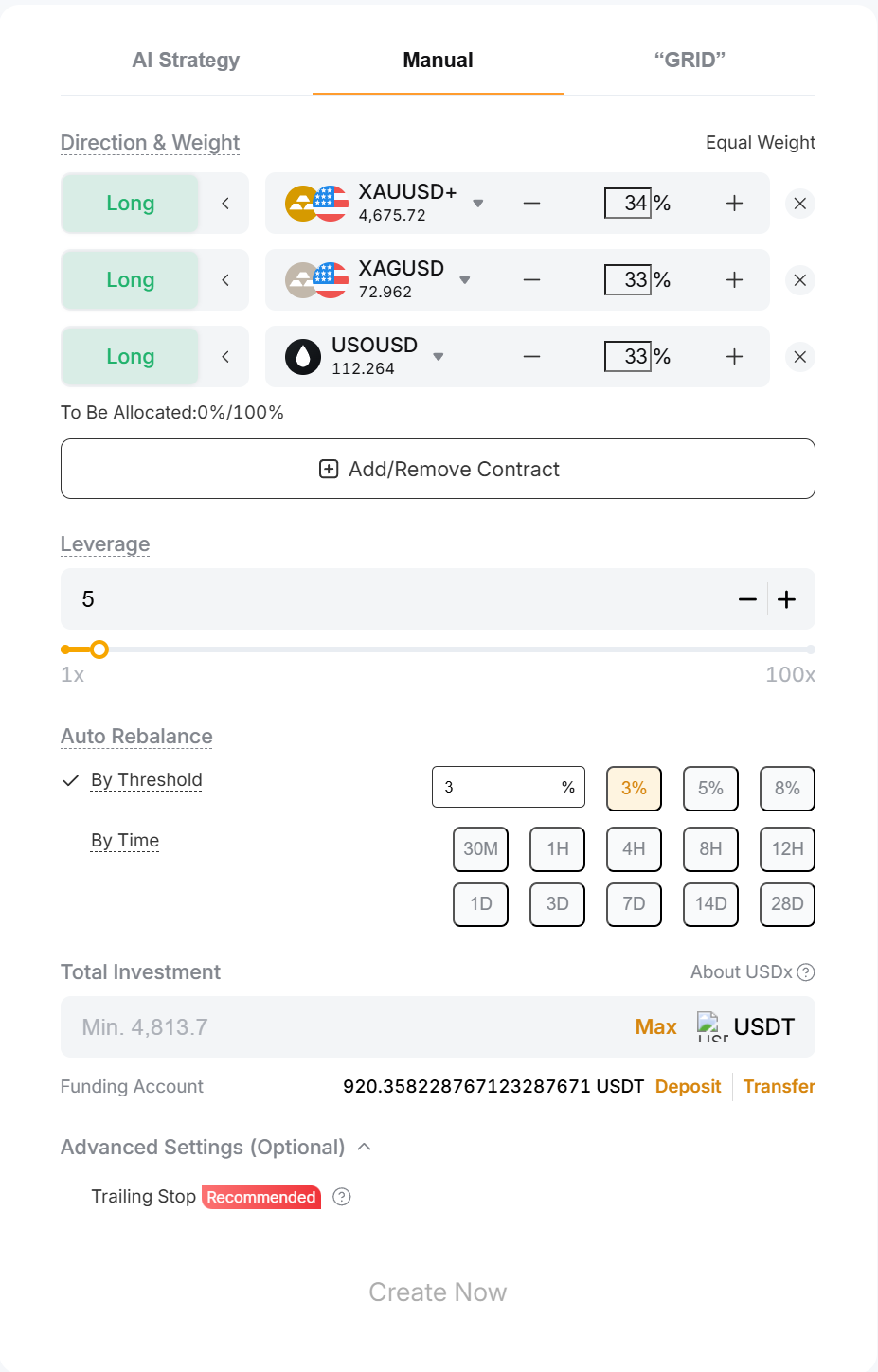
手動
在手動模式中,您可以自訂所有參數,以獲得最大的靈活性和對策略的精確控制。請參考下方的參數說明來設定您的機器人。
參數 | 說明 |
方向與權重 | 做多/做空:決定倉位方向。
合約:設定要納入投資組合的合約。
權重:定義投資組合中各合約的配置比例,總和須為 100%。您也可以使用「等權重」按鈕來平均分配。 |
待分配 | 顯示投資組合中尚未分配的百分比。若要成功建立 TradFi 拼盤機器人,總配置比例必須達到 100%。 |
槓桿 | 您可以選擇 1 倍到所有選定合約中最低最大槓桿之間的倍數,總上限為 100 倍。這表示即使您選定的合約中最低的最大槓桿超過 100 倍 (例如 120 倍),您可設定的最大槓桿仍限制為 100 倍。
maxLv = min(max(Lv₁), max(Lv₂), …, max(Lvₙ))
範例 如果您的 TradFi 拼盤機器人包含 XAUUSD+、XAGUSD 和 TSLA,其最大槓桿分別為 500 倍、100 倍和 5 倍,則該機器人可設定的最大槓桿為 5 倍。 注意:本範例中的數值僅供說明之用。實際槓桿請參考下單頁面。 |
自動調倉 | 根據比例閾值或固定時間間隔自動調整倉位。
例如,如果您將 XAUT:TSLA:GAS 的比例設定為 5:3:2,而相對價值變為 6:3:1,系統將會下單以恢復原來的 5:3:2 配置。 |
總投資額 | 您希望投入此機器人的金額。系統會根據您選擇的參數計算所需的最低投資額。 |
追蹤止損 (可選) | 追蹤止損功能會根據您帳戶記錄到的最高權益自動調整出場價位。
例如,若您一週內的權益在 500、450、600、900、800、1,000 和 800 之間波動,且您設定了 20% 的回撤率,則您的出場權益將分別為 400、400、480、720、720、800 和 800。
當您的帳戶權益下降至 800 (與出場權益相符) 時,將觸發追蹤停損,以市價平掉所有倉位並終止機器人。請注意,由於滑價,您的最終帳戶權益可能會與平倉權益不同。 |
備註:請確保您的資金帳戶中有足夠的資金以建立機器人。
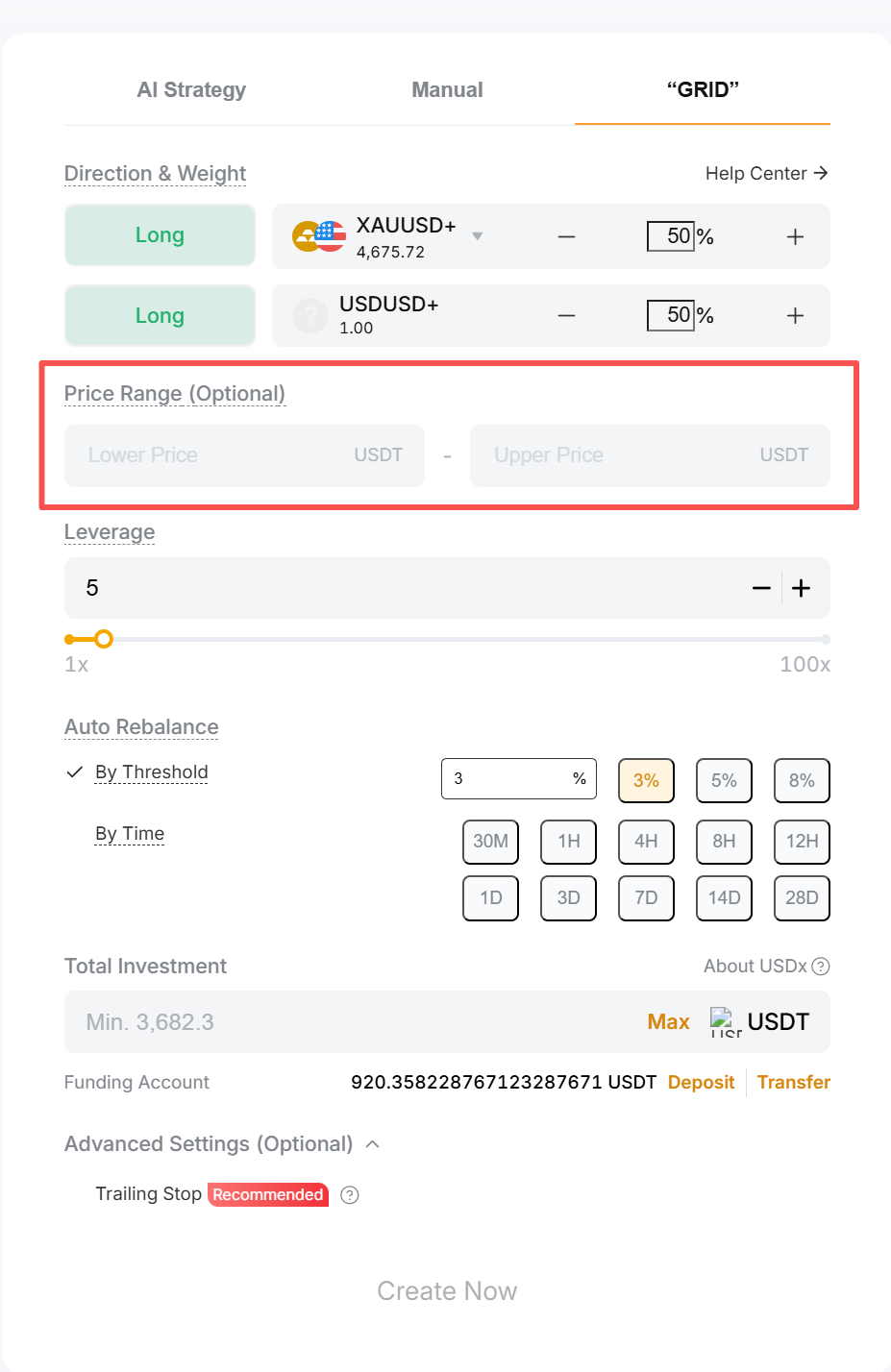
網格
在網格模式下,系統會遵循旨在模擬網格策略的結構化調倉策略。所有參數都與手動模式相同,另外還新增了定義的價格範圍。
當價格維持在此範圍內時,系統會透過賣出價值增加的資產並買入價值下跌的資產,來自動調倉您的投資組合。這有助於維持您的目標配置,同時採用嚴謹的低買高賣策略。
如果價格超出定義的範圍,調倉將會停止,且資產權重將完全由市場波動決定。
範例
以下範例說明「網格」模式的運作方式。為簡化起見,價格以 50 美元的增量移動。
- 投資金額:$100,000
- 初始 XAUT 價格:$1,000
- 價格範圍:$800 至 $1,300
- 價格步長:$50
- 配置:XAUUSD+ (多頭,50%),USDUSD+ (多頭,50%)
- 調倉條件:5% 偏差 (按閾值)
XAUT 價格 ($) | XAUT 價值 ($) | 美元價值 ($) | 總價值 ($) | 權重 (XAUT) | 是否調倉? | 調整金額 | 調整前 XAUT 數量 | 調整後 XAUT 數量 | 調整後美元價值 |
1,000 | 50,000 | 50,000 | 100,000 | 50.00% | — | — | 50 | 50 | 50,000 |
1,050 | 52,500 | 50,000 | 102,500 | 51.22% | 否 | — | 50 | 50 | 50,000 |
1,100 | 55,000 | 50,000 | 105,000 | 52.38% | 否 | — | 50 | 50 | 50,000 |
1,150 | 57,500 | 50,000 | 107,500 | 53.49% | 否 | — | 50 | 50 | 50,000 |
1,200 | 60,000 | 50,000 | 110,000 | 54.55% | 否 | — | 50 | 50 | 50,000 |
1,250 | 62,500 | 50,000 | 112,500 | 55.56% | 是 | $6,250 賣出 5 XAUT | 50 | 45 | 56,250 |
1,200 | 54,000 | 56,250 | 110,250 | 48.97% | 否 | — | 45 | 45 | 56,250 |
1,150 | 51,750 | 56,250 | 108,000 | 47.92% | 否 | — | 45 | 45 | 56,250 |
1,100 | 49,500 | 56,250 | 105,750 | 46.81% | 否 | — | 45 | 45 | 56,250 |
1,050 | 47,250 | 56,250 | 103,500 | 45.65% | 否 | — | 45 | 45 | 56,250 |
1,000 | 45,000 | 56,250 | 101,250 | 44.44% | 是 | $5,625 買入 5.625 XAUT | 45 | 50.625 | 50,625 |
- 當 XAUT 價格從 $1,000 上漲至 $1,200 時,其權重仍低於 55% (50% 目標 + 5% 閾值),因此不會觸發調倉。
- 當價格達到 $1,250 時,XAUT 權重增加至 55.56%,超過閾值。系統會觸發調倉並賣出 XAUT,以恢復 50:50 的配置。
- 在 $1,250 價位調倉後:
- XAUT 價值 = 美元價值 = $112,500 ÷ 2 = $56,250
- 調整金額 = $62,500 − $56,250 = $6,250
- 賣出的 XAUT = $6,250 ÷ 1,250 = 5 XAUT
- 調整後持有的 XAUT = 50 − 5 = 45 XAUT
- 如果價格繼續上漲並超出設定範圍 (例如 $1,500),即使配置進一步偏離,也不會再發生調倉。
- 當價格從 $1,250 下跌至 $1,050 時,XAUT 權重仍高於 45% (50% 目標 − 5% 閾值),因此不會觸發調倉。
- 當價格跌至 $1,000 時,XAUT 權重降至 44.44%,低於閾值。系統接著會觸發調倉並買入 XAUT。
- 在 $1,000 價位調倉後:
- XAUT 價值 = 美元價值 = $101,250 ÷ 2 = $50,625
- 調整金額 = $56,250 − $50,625 = $5,625
- 買入的 XAUT = $5,625 ÷ 1,000 = 5.625 XAUT
- 調整後持有的 XAUT = 45 + 5.625 = 50.625 XAUT
注意:以上範例僅供說明之用,可能無法反映實際市場狀況。此範例未將保證金要求或其他因素納入考量。
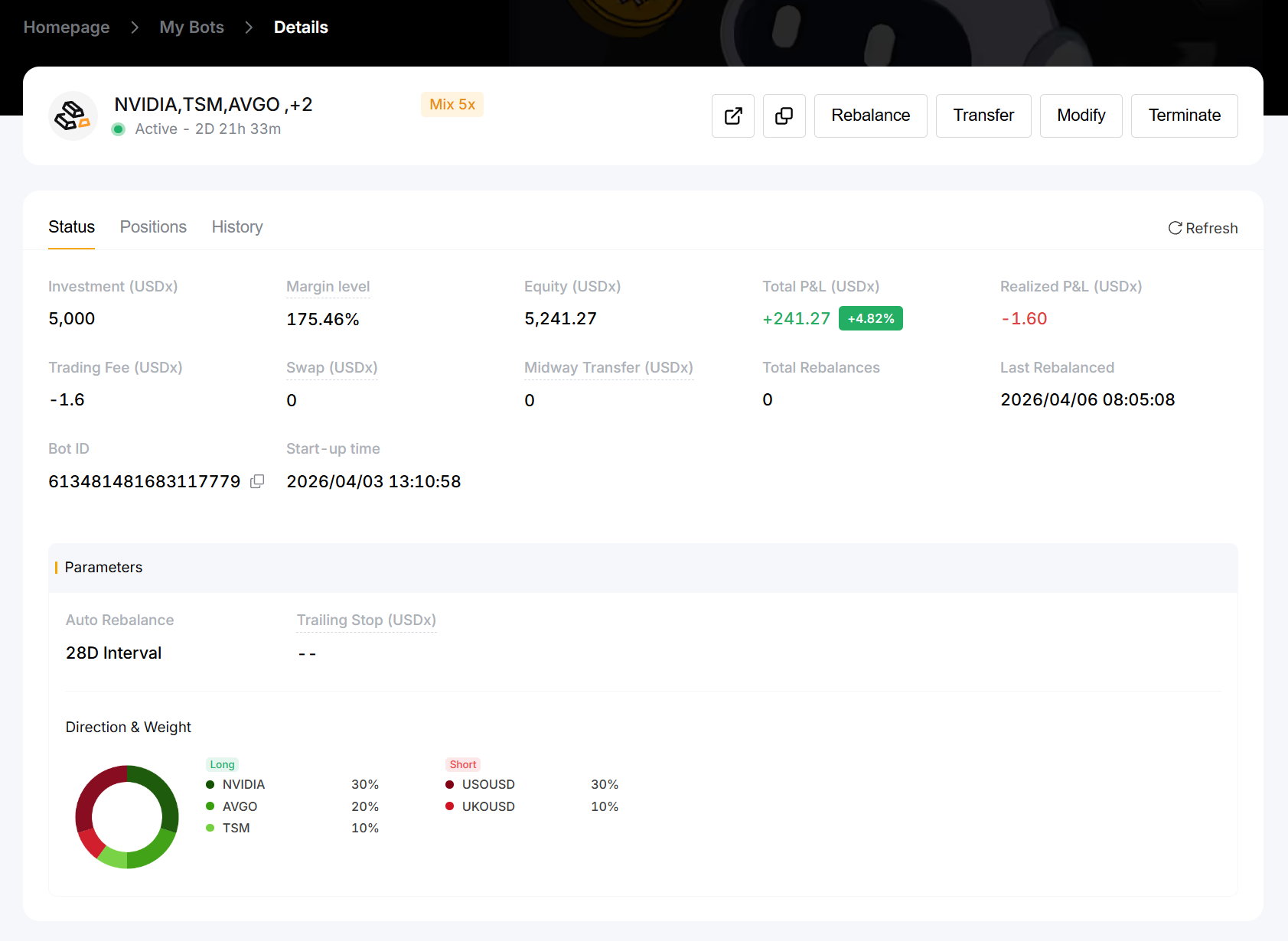
機器人詳情頁面 – 狀態分頁
在詳情頁面的狀態分頁中,您可以找到關於 TradFi 拼盤機器人的關鍵資訊,包括您已配置的參數。以下是此頁面上提供的其他重要詳情:
參數 | 說明 |
保證金水平 | 表示您有多少可用資金被用作保證金,並反映您帳戶的風險水平。較高的保證金水平 (通常高於 100%) 表示您有更多可用保證金,帳戶也更健全。較低的保證金水平表示風險較高,如果市場走勢對您的倉位不利,可能會導致追加保證金通知或強制平倉。
保證金水平 = 淨值 ÷ 保證金 × 100%
如果您的保證金水平下降至 50% 強制平倉水平,將會觸發保證金平倉。您的 TradFi 拼盤機器人將自動終止,所有倉位將以市價平倉。 |
資產淨值 (USDx) | 機器人中持有資產的當前價值,包含未實現盈虧。 |
總盈虧 (USDx) | 總盈虧是未實現盈虧和已實現盈虧的總和。 - 已實現盈虧:平倉倉位在扣除交易費用後的利潤或虧損。
- 未實現盈虧:根據平均持倉成本與當前市價之間的差額計算。
|
手續費 (USDx) | 您的機器人產生的交易費用。 費用結構與 Bybit TradFi 交易相同。欲知詳情,請參閱TradFi:費用說明。 |
掉期 (USDx) | 每日結算後持有的倉位將收取隔夜利息。 |
中途劃轉 (USDx) | 您至今已轉入機器人的總金額。 備註:若機器人中的任何合約因市場休市而暫停交易,新增的資金將不會觸發調倉,僅會用作保證金。 |
調倉總次數 | 機器人自動調倉倉位的總次數。 |
上次調倉時間 | 機器人最近一次執行自動調倉的時間。 |
注意:USDx 是一個內部顯示單位,以 1:1 的比例反映您在 TradFi 帳戶中所持 USDT 的代表價值。此價值會記錄在平台帳本中。USDx 並非法定貨幣。欲知詳情,請參閱此公告。
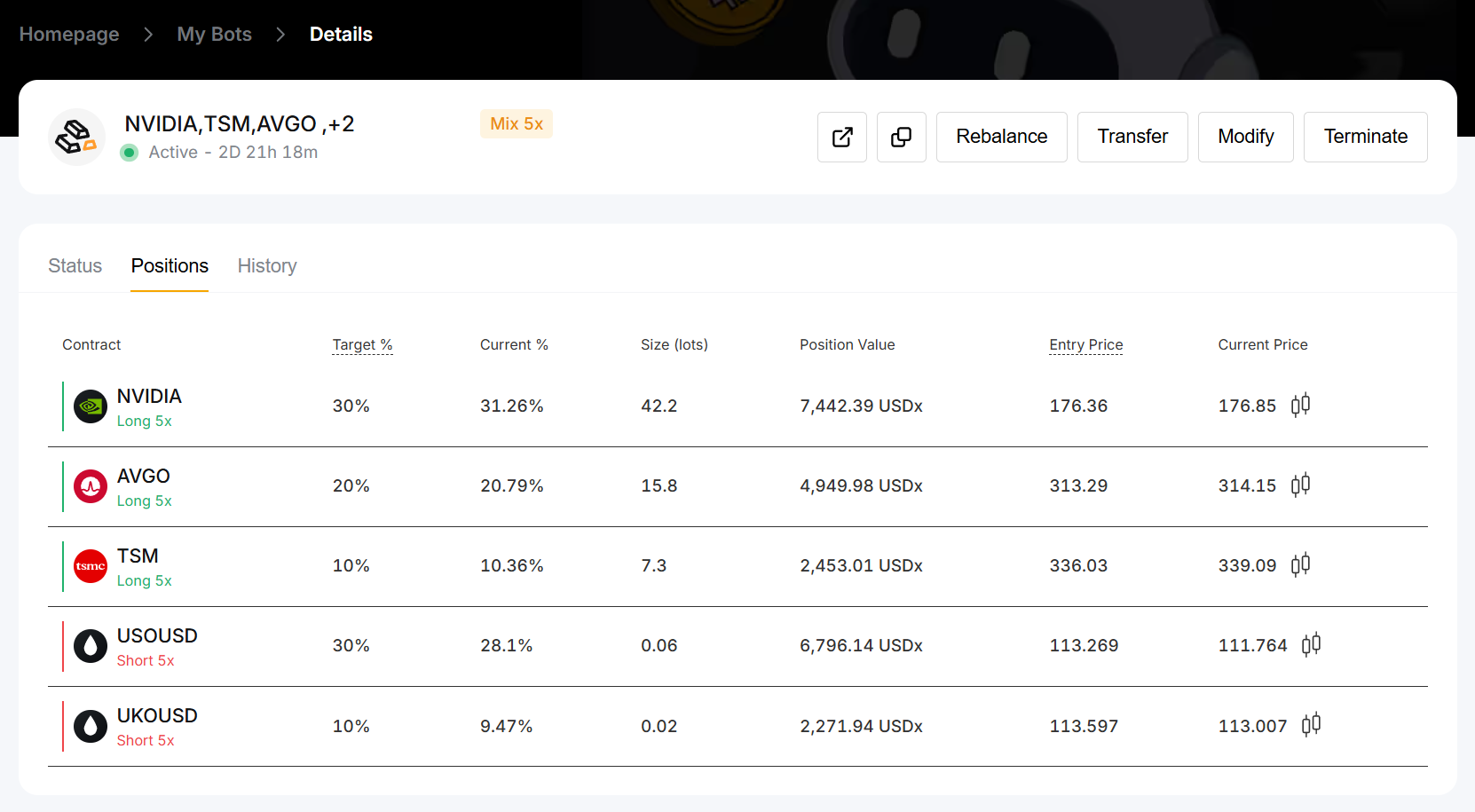
機器人詳情頁 – 倉位分頁
詳情頁的「倉位」分頁會顯示您 TradFi 拼盤機器人中各合約的所有持有倉位。
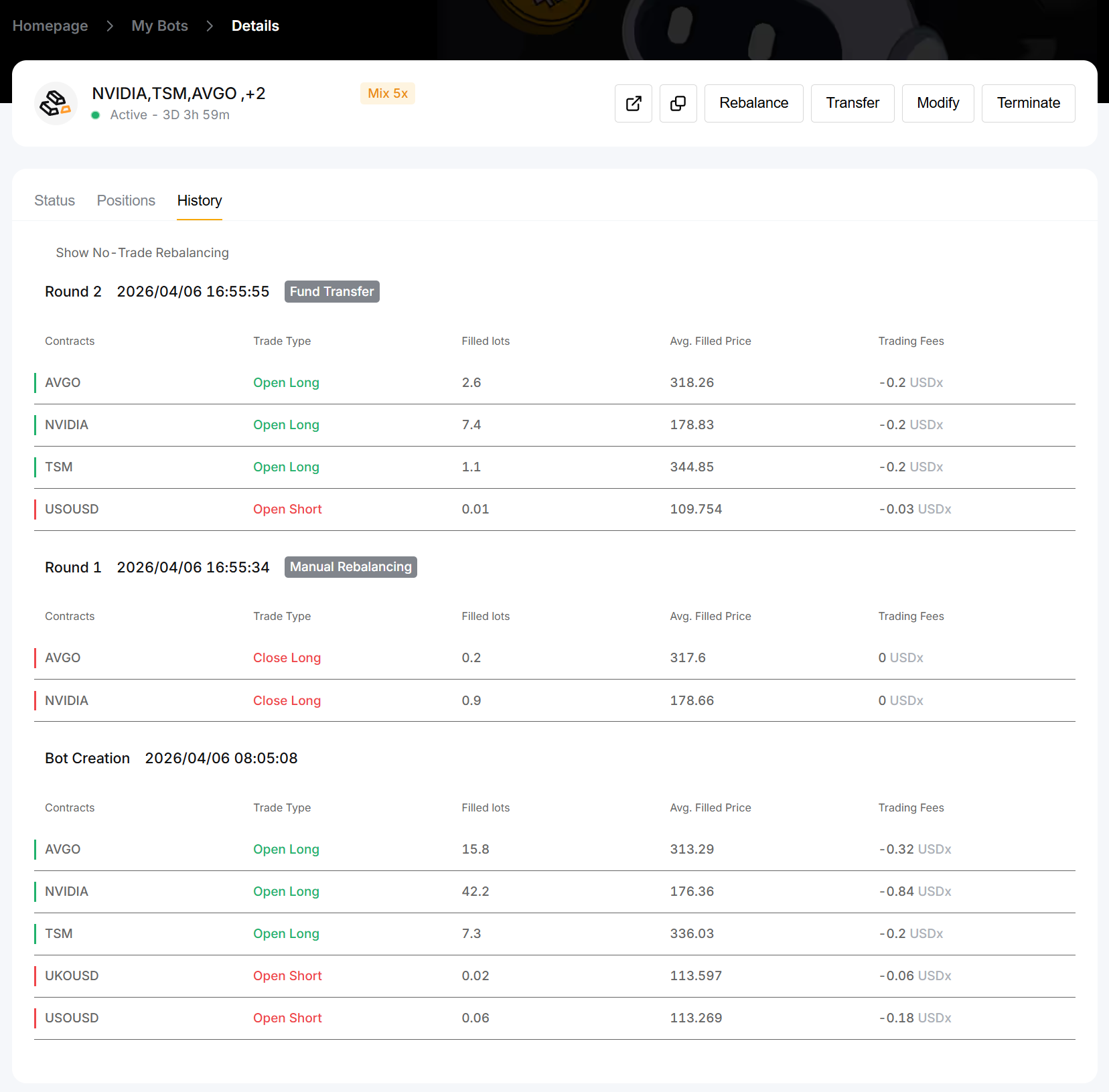
機器人詳情頁 – 歷史紀錄分頁
詳情頁的「歷史紀錄」分頁提供過去活動的相關資訊,包含機器人創建、終止及每一輪的調倉。